Aux étapes préliminaires, des parties importantes des travaux d’aménagement portuaire peuvent être réalisées à l’aide du logiciel de simulation Kongsberg et, dans la mesure du possible, en se servant de ce que Kongsberg appelle des navires porteurs, lesquels sont entièrement interactifs et totalement influencés par des forces externes comme la vitesse du grand navire, le vent et l’état de la mer.
Des stricts points de vue de la simulation et des mathématiques, les simulations en temps accéléré (Fast Time Simulation) offrent la même fidélité et la même exactitude que celles effectuées en temps réel, la différence majeure résidant dans les systèmes de commande des navires représentés et le degré d’immersion humaine dans l’environnement. Avec le poste de table, tous les aspects de la simulation et les dispositifs de commande de navire sont contrôlés par un seul ordinateur pourvu d’une seule interface‑utilisateur pour l’instructeur, ce qui contraste avec le simulateur de mission complète navire et remorqueur, entièrement immersif, où un capitaine de remorqueur dirige chaque remorqueur à l’aide de commandes véritables et où un pilote en chair et en os, au moyen de véritables commandes et de dispositifs radio, conduit le grand navire et coordonne le remorquage. En outre, avec la simulation en accéléré, l’analyse est entièrement basée sur l’évaluation des sorties numériques et des données tracées alors que la simulation en temps réel ajoute l’environnement totalement immersif qui fait intervenir des facteurs humains, l’interface homme‑machine et l’évaluation (parfois subjective) de la faisabilité opérationnelle et de l’analyse de risque comme si l’opération était exécutée dans la vraie vie.
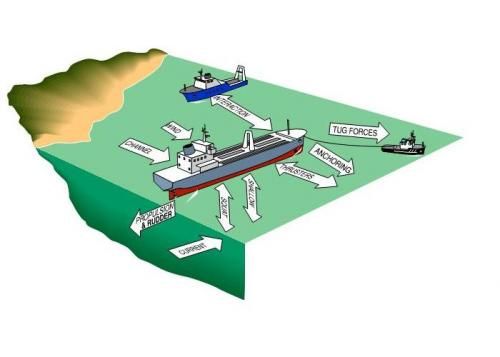
Cette distinction faite, il importe de bien comprendre que la simulation en accéléré, peut fort bien être utilisée pour évaluer des manœuvres qui ne sont pas excessivement complexes comme des manœuvres de freinage d’urgence, l’évitage avec un ou deux remorqueurs d’escorte ou encore l’aptitude de deux ou plusieurs remorqueurs d’assistance à retenir un navire contre le vent ou à contrer la dérive ou les effets du courant. Ce type de simulation peut aussi servir à réaliser des évaluations préliminaires du mouvement du navire, des effets nuisibles de l’état de la mer et des fluctuations de la charge de la remorque dans différentes conditions. Le facteur limitatif avec ces simulations c’est la capacité de l’opérateur du simulateur de manœuvrer les remorqueurs d’une façon et selon une ligne de temps compatibles avec des manœuvres en situation réelle (en se servant du système de commande rudimentaire constitué par un clavier et une souris), et donc à maintenir l’intégrité de la simulation. De plus, toute manœuvre de navire ou de remorqueur doit être exécutée à la vitesse réelle, alors que les manœuvres ou les segments de manœuvres ne comportant ni action du gouvernail ni variation du régime de la machine peuvent être exécutés en accéléré.
Les manœuvres et opérations très pointues comme les dernières étapes de l’accostage, ou les manœuvres nécessitant beaucoup de déplacements des remorqueurs ne doivent être exécutées qu’en temps réel, à moins qu’une certaine imprécision ne soit jugée tolérable.
{kind=link}